

Project Solutions
Digital Motors: intelligent drive for servos
Published:2011/8/8 1:17:00 Author:Li xiao na From:SeekIC
By Giel Dols
Analogue servos are really ingenious bits of hardware. But there’s an even better alternative: the digital servo! Based on the operation of the ’normal’ servo we tell you what’s so much better about the latest digital ones. 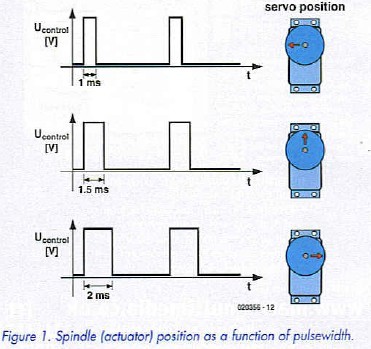
A servo is a combination of a dc, ac or brushless motor with a position detection circuit. In modelling and robotics, we usually find three-wire dc servos. Such a servo then consists of dc motor, a reduction gearbox and two mechanical ’stops’ preventing the spindle from turning beyond extreme positions. Usually, the servo also contains a potentiometer that enables the position of the spindle to be communicated to a small piece of electronics. The circuit, then, is the link between the motor, the measured position and the real world.
The three wires carry the supply voltage, ground and the drive signal to the servo. The drive signal — in RC modelling usually supplied by a receiver — determines the target position of the servo spindle. If external forces (like air pressure on a model plane rudder) try to change the spindle position, the feedback in the control circuitry will counteract the movement and ensure the rudder remains in the desired position. As long as its drive signal remains unchanged, a servo will maintain the current spindle position, correcting it if necessary. Only if there’s a change in the drive signal will the spindle move to a different position.
Operation
The drive signal consists of rectangular pulses with a swing of 5 V. The pulse period time is constant and the width of individual pulses determines the spindle position. The zero or home position of a servo corresponds t a pulse width of about 1.5 ms. Depending on the desired amount of spindle rotation, the control pulses are shortened or lengthened. However, the period of 20 ms is maintained al the time.
The servo actuator spindle is coupled to a potentiometer. Consequently, the potentiometer’s wiper position not only indicates the spindle position but also equates to a certain pulse width. The internal electronics looks after this fixed relationship, maintaining the spindle position until a change in the drive signal pulse width occurs.
The digital way
In recent years, servos have seen great improvements — size, responses time and actuator force have been subject to constant improvements. The latest development called ’digital servo’ is an important step forward.
In principle, the digital servo is equal to its analogue ancestor. The only difference exists in the activities of a microcontroller constantly analyzing the drive signal and if necessary driving the motor. The mechanical construction is the same as that of the analogue counterpart.
The use of a microcontroller offers significant advantages. As already mentioned, an analogue servo is capable of correcting its spindle position to counteract external forces. Not much will happen if the external ’disruption’ is small, as small changes equate to narrow pulses. In many cases, the effective power fed to the motor under these conditions is too low to get the motor to turn so a certain amount of hysteresis is created: below a certain limit, the servo will respond in a non-linear fashion to disturbances in the spindle position. With digital servos, the microcontroller has been programmed to ’know’ the motor’s specific response and account for it in the way it is driven. For example, the width of the pulses sent to the motor in response to a relatively small spindle movement will be larger than with an analogue servo. Because the software allows the processor to calculate the optimum amount and length of the drive pulses for a certain disturbance or desired position, a digital servo will show much faster accurate responses.
It’s not just the ’intelligence’ that makes the servo behave the way we want. A further difference with analogue servos is the use of much higher switching frequencies of the motor drive pulses. This not only benefits the accuracy, but also allows more power to be delivered as the motor can be ’on’ more often. Extra power is not only practical in maintaining the existing spindle position, but also when moving to a new one because the sensor can accelerate much faster and reach the target position well before its analogue counterpart.
Disadvantage?
Increased energy consumption is a direct consequence of higher motor pulse speeds. This disadvantage should be duly considered when applying the new digital servos in any battery-powered equipment like model craft. Fortunately, the problem is far from insurmountable thanks to recent advances in battery technology. 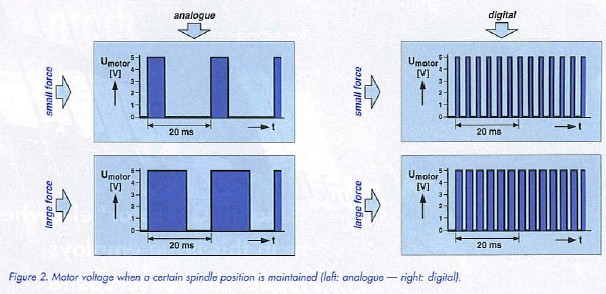
Reprinted Url Of This Article: http://www.seekic.com/blog/project_solutions/2011/08/08/Digital_Motors__intelligent_drive_for_servos.html
Print this Page | Comments | Reading(1344)
Article Categories
New published articles
· Imagination works with TSMC to develop FinFET process
Author:Ecco Reading(48216)
· XMOS pushes event-driven MCUs with lower price
Author:Ecco Reading(4212)
· Intel brings upgraded 32-nm SoC for smartphones
Author:Ecco Reading(3936)
· Micron pushes TLC 128-Gbit NAND flash
Author:Ecco Reading(4676)
· Intel will stop supplying desktop motherboards
Author:Ecco Reading(6018)
· Processor market was expected to regain strength in 2013
Author:Ecco Reading(4013)
· It was reported that TSMC sales fall steeply
Author:Ecco Reading(3682)
· Cisco, NXP work with auto wireless startup
Author:Ecco Reading(4351)
· Micron was impacted by manufacturing glitch
Author:Ecco Reading(4703)
· China can make 22-nm transistor by themselves
Author:Ecco Reading(4567)
· Chip market rebound is coming, according to survey
Author:Ecco Reading(4442)
· Sony, Toshiba will spend more on chips, iSuppli reports
Author:Ecco Reading(4008)
· Qualcomm becomes the 13th company to join NFC Forum board
Author:Ecco Reading(6863)
· TSMC increases building work for FinFET fab
Author:Ecco Reading(4528)
· TI plans to cut 1,700 jobs in OMAP shift
Author:Ecco Reading(5408)